
About Me
I am a junior undergraduate student majoring in Intelligent Science and Technology at Nanjing University (Suzhou Campus). I come from Hong Kong. I am currently seeking opportunities for overseas graduate studies (Fall 2027 entry).
My research centers on Embodied AI and robotics — perception, spatial memory, and decision-making that let robots act reliably in unstructured real-world environments. I have hands-on experience across navigation, semantic mapping, and real-robot deployment, and I am currently exploring lifelong robot memory and uncertainty-aware interactive navigation.
I am currently an undergraduate researcher working with Associate Professor Jieqi Shi in the Reasoning and Learning Research Group, led by Professor Yang Gao at the State Key Laboratory for Novel Software Technology, Nanjing University. In Summer 2026, I will join the National University of Singapore (NUS) as a research intern with Prof. Lin Shao, working on embodied AI.
News
- [Summer 2026] Incoming Research Intern at the National University of Singapore (NUS), advised by Prof. Lin Shao — embodied AI.
- [2026.06] Invited to serve as a Reviewer for IEEE Robotics and Automation Letters (RA-L).
- [2026.06] INHerit-SG named a Best Presentation Finalist at the ICRA 2026 Workshop on Robots Meet Prior Maps.
- [2026.05] INHerit-SG selected for Oral Presentation at the ICRA 2026 Workshop on Robots Meet Prior Maps.
- [2026.01] LaViRA accepted to ICRA 2026.
Publications
INHerit-SG: Incremental Hierarchical Semantic Scene Graphs with RAG-Style Retrieval
Yuk Tung Samuel Fang, Zhikang Shi, Jiabin Qiu, Zixuan Chen, Jieqi Shi, Hao Xu, Jing Huo, Yang Gao
ICRA 2026 Workshop on Robots Meet Prior Maps (Oral) 🏆 Best Presentation Finalist
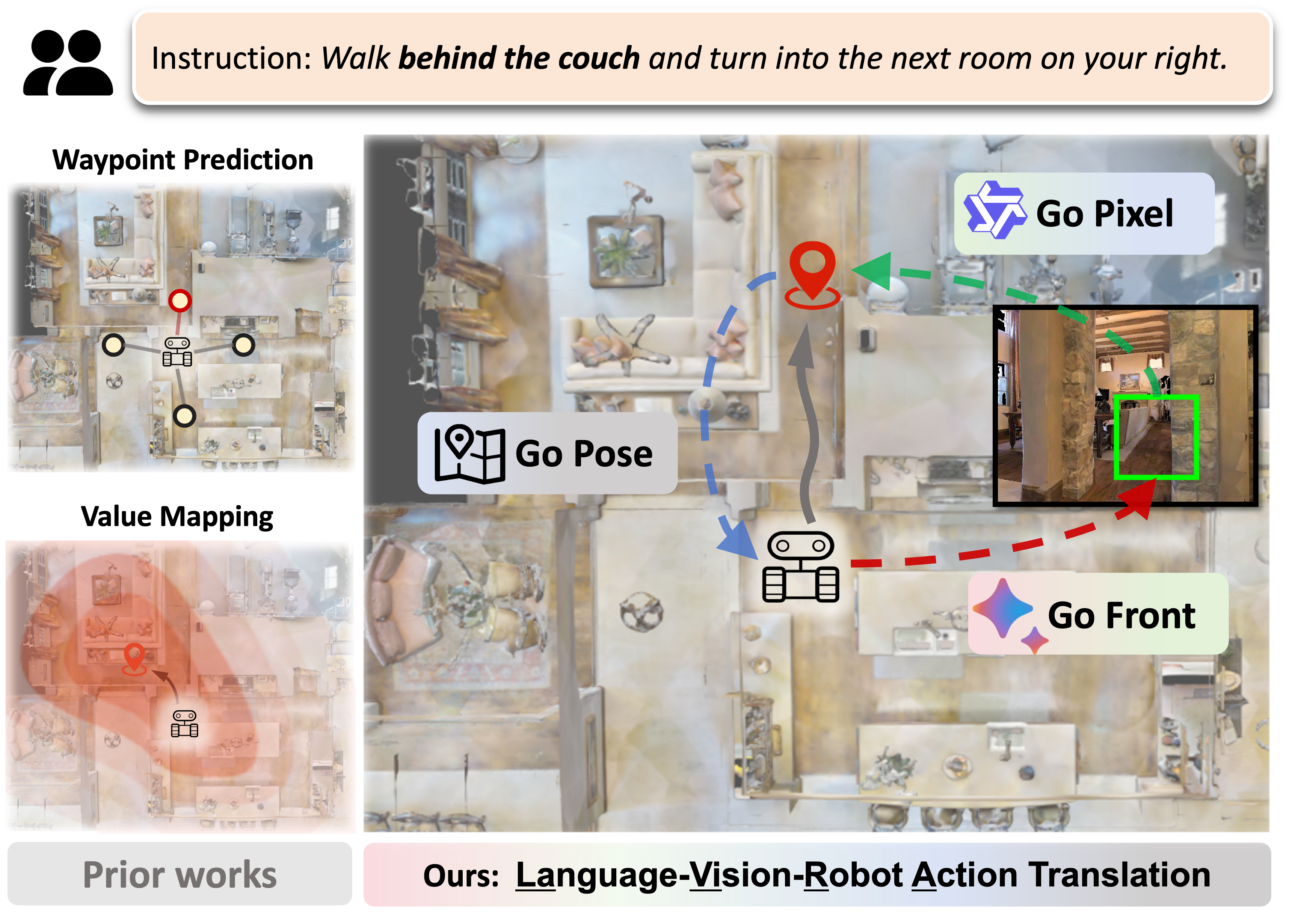
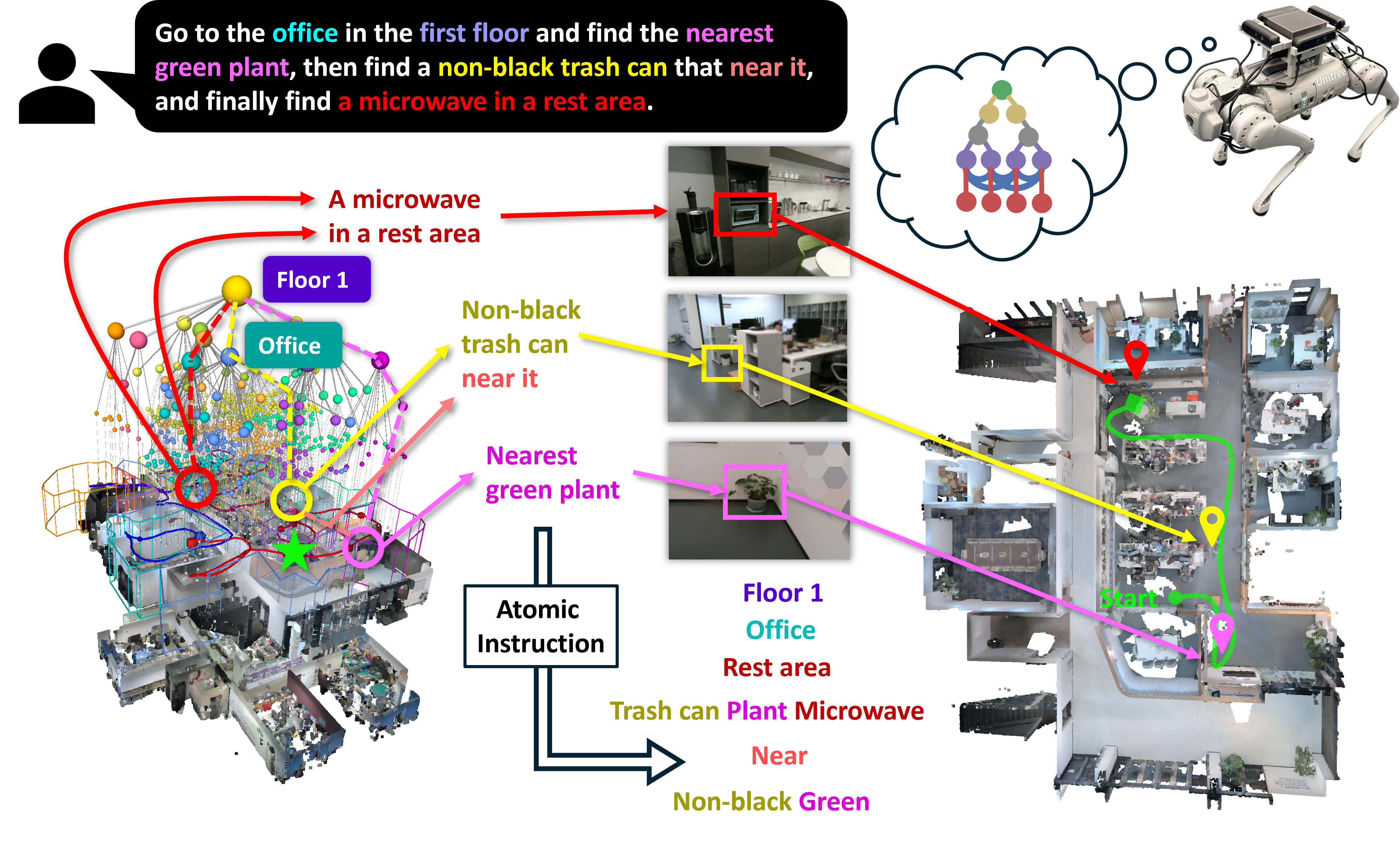
LaViRA: Language-Vision-Robot Actions Translation for Zero-Shot Vision Language Navigation in Continuous Environments
Hongyu Ding, Ziming Xu, Yudong Fang, You Wu, Zixuan Chen, Jieqi Shi, Jing Huo, Yang Gao
IEEE International Conference on Robotics and Automation (ICRA), 2026
Real-Robot Demos
Clips from my own deployments on real robots — not simulation. Unmute in the player for sound.
INHerit-SG 🏆 Oral · Best Presentation Finalist
Hierarchical semantic scene graphs · led real-robot data collection
LaViRA ICRA 2026
Zero-shot vision-language navigation · led Unitree Go1 deployment
CV
You can download my full CV here: Download CV (PDF)